MATLAB Project - Elbow
The Problem
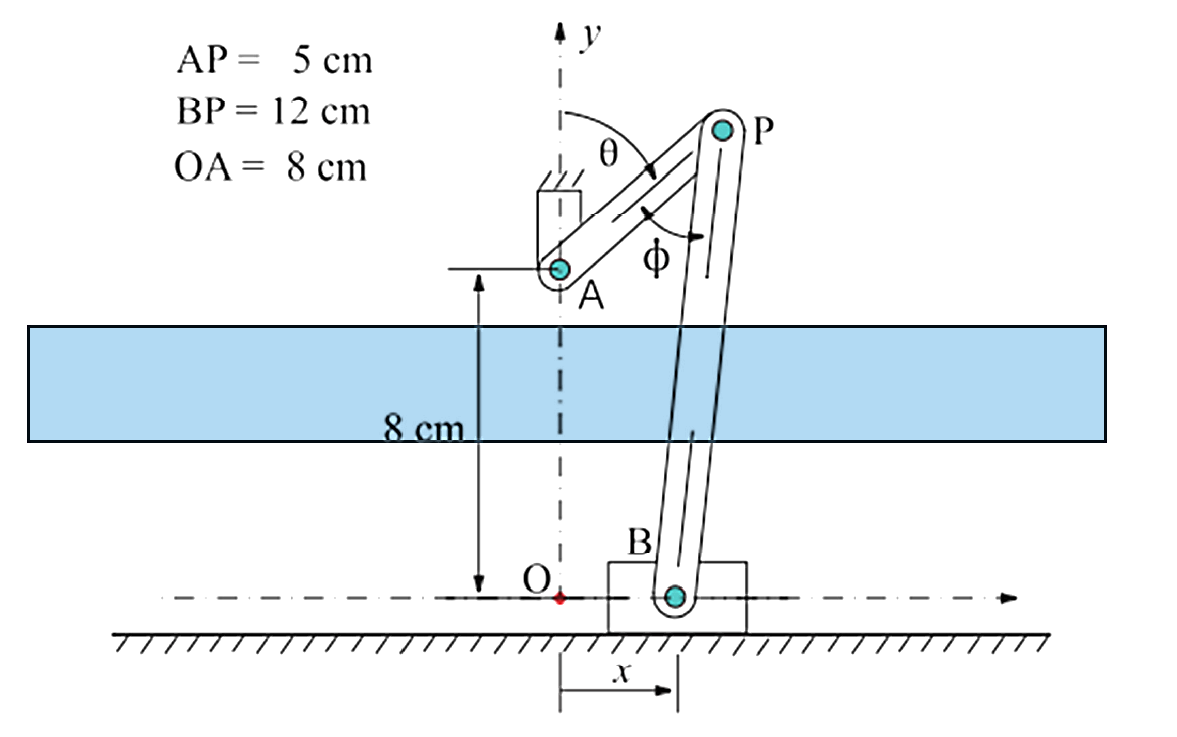
Consider the following mechanism, consisting of a crank AP and a lever PB loosely hinged at the “elbow” P so that it can bend only to the right. The end A is hinged to a fixed point 8 cm above an origin O. The crank AP has length 5 cm, and the lever PB has length 12 cm. The end B is able to slide back and forth along the x-axis in a harmonic fashion with amplitude 15 cm and period 2 sec, such that
=15 \cos \pi t") ,
,  ≥ 0.
≥ 0.
At any given instant t ≥ 0, let θ(t) (“theta”) denote the angle of rotation of the crank AP, measured in a clockwise direction from the upper vertical.
Let φ(t) (“phi”) be the angle at the elbow P, as shown.